Spaces:
Runtime error


Runtime error
| from contextlib import nullcontext | |
| from functools import partial | |
| import math | |
| import fire | |
| import gradio as gr | |
| import numpy as np | |
| import torch | |
| from einops import rearrange | |
| from ldm.models.diffusion.ddim import DDIMSampler | |
| from omegaconf import OmegaConf | |
| from PIL import Image | |
| from torch import autocast | |
| from torchvision import transforms | |
| from ldm.util import load_and_preprocess, instantiate_from_config | |
| def load_model_from_config(config, ckpt, device, verbose=False): | |
| print(f"Loading model from {ckpt}") | |
| pl_sd = torch.load(ckpt, map_location=device) | |
| if "global_step" in pl_sd: | |
| print(f"Global Step: {pl_sd['global_step']}") | |
| sd = pl_sd["state_dict"] | |
| model = instantiate_from_config(config.model) | |
| m, u = model.load_state_dict(sd, strict=False) | |
| if len(m) > 0 and verbose: | |
| print("missing keys:") | |
| print(m) | |
| if len(u) > 0 and verbose: | |
| print("unexpected keys:") | |
| print(u) | |
| model.to(device) | |
| model.eval() | |
| return model | |
| def sample_model(input_im, model, sampler, precision, h, w, ddim_steps, n_samples, scale, \ | |
| ddim_eta, x, y, z): | |
| precision_scope = autocast if precision=="autocast" else nullcontext | |
| with precision_scope("cuda"): | |
| with model.ema_scope(): | |
| c = model.get_learned_conditioning(input_im).tile(n_samples,1,1) | |
| T = torch.tensor([math.radians(x), math.sin(math.radians(y)), math.cos(math.radians(y)), z]) | |
| T = T[None, None, :].repeat(n_samples, 1, 1).to(c.device) | |
| c = torch.cat([c, T], dim=-1) | |
| c = model.cc_projection(c) | |
| cond = {} | |
| cond['c_crossattn'] = [c] | |
| c_concat = model.encode_first_stage((input_im.to(c.device))).mode().detach() | |
| cond['c_concat'] = [model.encode_first_stage((input_im.to(c.device))).mode().detach()\ | |
| .repeat(n_samples, 1, 1, 1)] | |
| if scale != 1.0: | |
| uc = {} | |
| uc['c_concat'] = [torch.zeros(n_samples, 4, h // 8, w // 8).to(c.device)] | |
| uc['c_crossattn'] = [torch.zeros_like(c).to(c.device)] | |
| else: | |
| uc = None | |
| shape = [4, h // 8, w // 8] | |
| samples_ddim, _ = sampler.sample(S=ddim_steps, | |
| conditioning=cond, | |
| batch_size=n_samples, | |
| shape=shape, | |
| verbose=False, | |
| unconditional_guidance_scale=scale, | |
| unconditional_conditioning=uc, | |
| eta=ddim_eta, | |
| x_T=None) | |
| print(samples_ddim.shape) | |
| # samples_ddim = torch.nn.functional.interpolate(samples_ddim, 64, mode='nearest', antialias=False) | |
| x_samples_ddim = model.decode_first_stage(samples_ddim) | |
| return torch.clamp((x_samples_ddim + 1.0) / 2.0, min=0.0, max=1.0).cpu() | |
| def main( | |
| model, | |
| device, | |
| input_im, | |
| x=0., | |
| y=0., | |
| z=0., | |
| scale=3.0, | |
| n_samples=4, | |
| ddim_steps=50, | |
| preprocess=True, | |
| ddim_eta=1.0, | |
| precision="fp32", | |
| h=256, | |
| w=256, | |
| ): | |
| # input_im[input_im == [0., 0., 0.]] = [1., 1., 1., 1.] | |
| print(input_im.size) | |
| if preprocess: | |
| input_im = load_and_preprocess(input_im) | |
| else: | |
| input_im = input_im.resize([256, 256], Image.Resampling.LANCZOS) | |
| input_im = np.asarray(input_im, dtype=np.float32) / 255. | |
| input_im[input_im[:, :, -1] <= 0.9] = [1., 1., 1., 1.] # very important, thresholding background | |
| input_im = input_im[:, :, :3] | |
| print(input_im.shape) | |
| input_im = transforms.ToTensor()(input_im).unsqueeze(0).to(device) | |
| input_im = input_im * 2 - 1 | |
| input_im = transforms.functional.resize(input_im, [h, w]) | |
| sampler = DDIMSampler(model) | |
| x_samples_ddim = sample_model(input_im, model, sampler, precision, h, w,\ | |
| ddim_steps, n_samples, scale, ddim_eta, x, y, z) | |
| output_ims = [] | |
| for x_sample in x_samples_ddim: | |
| x_sample = 255. * rearrange(x_sample.cpu().numpy(), 'c h w -> h w c') | |
| output_ims.append(Image.fromarray(x_sample.astype(np.uint8))) | |
| return output_ims | |
| description = \ | |
| """Generate variations on an input image using a fine-tuned version of Stable Diffision. | |
| Trained by [Justin Pinkney](https://www.justinpinkney.com) ([@Buntworthy](https://twitter.com/Buntworthy)) at [Lambda](https://lambdalabs.com/) | |
| __Get the [code](https://github.com/justinpinkney/stable-diffusion) and [model](https://huggingface.co/lambdalabs/stable-diffusion-image-conditioned).__ | |
| 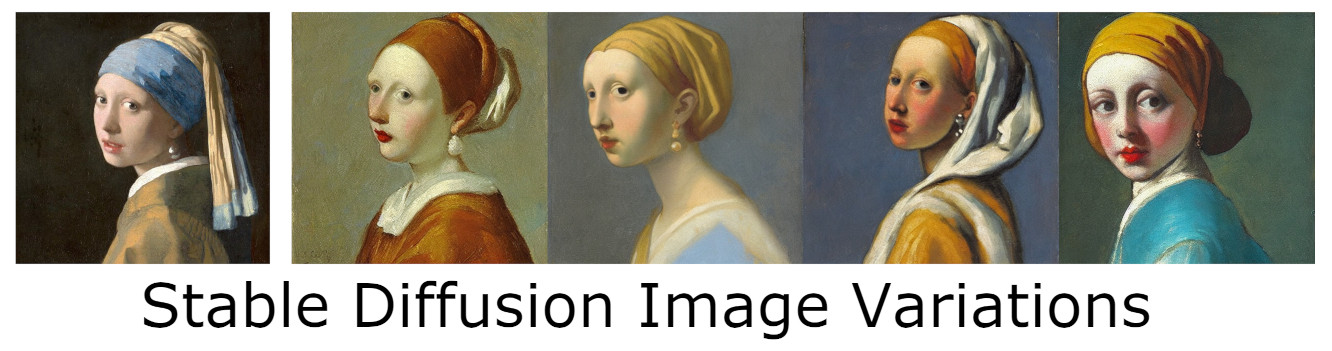 | |
| """ | |
| article = \ | |
| """ | |
| ## How does this work? | |
| The normal Stable Diffusion model is trained to be conditioned on text input. This version has had the original text encoder (from CLIP) removed, and replaced with | |
| the CLIP _image_ encoder instead. So instead of generating images based a text input, images are generated to match CLIP's embedding of the image. | |
| This creates images which have the same rough style and content, but different details, in particular the composition is generally quite different. | |
| This is a totally different approach to the img2img script of the original Stable Diffusion and gives very different results. | |
| The model was fine tuned on the [LAION aethetics v2 6+ dataset](https://laion.ai/blog/laion-aesthetics/) to accept the new conditioning. | |
| Training was done on 4xA6000 GPUs on [Lambda GPU Cloud](https://lambdalabs.com/service/gpu-cloud). | |
| More details on the method and training will come in a future blog post. | |
| """ | |
| def run_demo( | |
| device_idx=0, | |
| ckpt="last.ckpt", | |
| config="configs/sd-objaverse-finetune-c_concat-256.yaml", | |
| ): | |
| device = f"cuda:{device_idx}" | |
| config = OmegaConf.load(config) | |
| model = load_model_from_config(config, ckpt, device=device) | |
| inputs = [ | |
| gr.Image(type="pil", image_mode="RGBA"), # shape=[512, 512] | |
| gr.Number(label="polar (between axis z+)"), | |
| gr.Number(label="azimuth (between axis x+)"), | |
| gr.Number(label="z (distance from center)"), | |
| gr.Slider(0, 100, value=3, step=1, label="cfg scale"), | |
| gr.Slider(1, 8, value=4, step=1, label="Number images"), | |
| gr.Slider(5, 200, value=100, step=5, label="steps"), | |
| gr.Checkbox(True, label="image preprocess (background removal and recenter)"), | |
| ] | |
| output = gr.Gallery(label="Generated variations") | |
| output.style(grid=2) | |
| fn_with_model = partial(main, model, device) | |
| fn_with_model.__name__ = "fn_with_model" | |
| examples = [ | |
| # ["assets/zero-shot/bear.png", 0, 0, 0, 3, 4, 100], | |
| # ["assets/zero-shot/car.png", 0, 0, 0, 3, 4, 100], | |
| # ["assets/zero-shot/elephant.png", 0, 0, 0, 3, 4, 100], | |
| # ["assets/zero-shot/pikachu.png", 0, 0, 0, 3, 4, 100], | |
| # ["assets/zero-shot/spyro.png", 0, 0, 0, 3, 4, 100], | |
| # ["assets/zero-shot/taxi.png", 0, 0, 0, 3, 4, 100], | |
| ] | |
| demo = gr.Interface( | |
| fn=fn_with_model, | |
| title="Stable Diffusion Novel View Synthesis (Image)", | |
| # description=description, | |
| # article=article, | |
| inputs=inputs, | |
| outputs=output, | |
| examples=examples, | |
| allow_flagging="never", | |
| ) | |
| demo.launch(enable_queue=True, share=True) | |
| if __name__ == "__main__": | |
| fire.Fire(run_demo) |